![]()
赛斯拜克中国核心技术品牌 博士专业研发团队 18年专注高光谱
咨询热线:400-888-5135
![]()
赛斯拜克中国核心技术品牌 博士专业研发团队 18年专注高光谱
咨询热线:400-888-5135
来源:赛斯拜克 发表时间:2023-07-05 浏览量:1595 作者:awei
罂粟是一种被广泛种植的植物,其种子可以提取出鸦片,用于制作毒品。因此,使用无人机高光谱遥感技术对罂粟种植的监测和控制成为了许多国家和地区的重要任务的一环。

传统的罂粟种植监测主要依靠人工巡查和航空摄影等手段,但这些方法存在着诸多限制,如成本高、效率低、覆盖面窄、识别困难等问题。而无人机高光谱遥感技术的出现,为罂粟种植的监测带来了革命性的改变。无人机高光谱遥感技术利用无人机搭载的高光谱相机,获取罂粟种植区域的多光谱图像数据。这些数据包含了大量的空间和光谱信息,通过无人机的快速高效飞行,可以对广大的种植区域进行全面的监测。

图2 罂粟植株与干扰物体
与传统方法相比,无人机高光谱遥感具有以下优势:
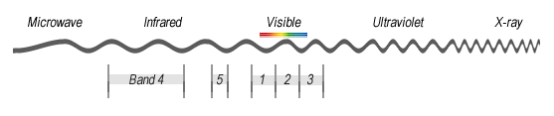
1.高光谱传感器可以捕捉到植物叶片的反射光谱。罂粟植物在不同生长阶段会有不同的光谱反射特征,通过高光谱遥感技术可以快速准确地识别罂粟种植区域。
2.无人机可以快速覆盖大面积的种植区域。以往的人工巡查需要耗费大量的时间和人力,而无人机可以在更短的时间内完成对整个地区的监测,大大提高了效率。
3.无人机高光谱遥感技术还可以结合图像处理和数据分析等技术,实现罂粟种植区域的自动识别和监测。通过对大量数据的处理和分析,可以更加准确地判断罂粟种植区域的位置和范围,为执法部门提供有力的依据。
1. 与可见光结果相比
可见光图像仅仅有红绿蓝(RGB)三个波段的光信息组成,在对罂粟识别时通过人工肉眼判读进行监测,效率低下且准确度有限。而高光谱图像结果具有300个波段的光信息,对于罂粟可以提取其专属的波段特征,从而对其进行准确的识别,同时结合机器学习算法,可以实现自动化监测。
2. 与多光谱结果相比
多光谱和高光谱的主要区别是波段的数量和窄度。多光谱图像通常由10-30个波段的光信息组成,对于罂粟或其他地物的检测特征有限,容易与其他地物的反射光谱混淆。在高光谱图像中具有更高水平的光谱细节可以提供更好的植被区分能力,例如在检测罂粟时,高光谱图像可以有效区分罂粟与其他相似植物,提高准确率。

罂粟的生长可分为4个周期,分别为苗期40天,蕾期20天,花期20天和果期20天,其中花果期由于罂粟的花朵形状独特、色彩艳丽,因此在该时间段内是罂粟巡查、铲除的黄金时期。所以每到春夏季节,全国各地的民警都会把查罂粟作为一个重点任务,此时无人机高光谱的优势不可取代,探查区域大、效率高。

图3 罂粟植株的生长周期
1. 飞行平台
SF500无人机高光谱成像系统是基于大疆工业级无人机旗舰产品M300RTK平台深度开发的一款轻小型旋翼无人机机载的高光谱成像系统,该系统由高光谱成像仪、轻小型旋翼高稳定性无人机、高稳定性云台、大容量存储系统、无线图像系统、GPS导航系统等组成,是当前市场上轻型化+科学级高光谱数据的优选组合方案。
核心载荷高光谱成像仪采用了性能卓越的科研级COMS探测器和高衍射效率的透射光栅分光元件,光谱范围覆盖400~1000nm,光谱分辨率优于2.5nm,具有极高的噪信比和空间分辨率,可以充分挖掘和利用不同物质自身特有的光谱信息,结合高清相机拍摄高清图片,实现对物质信息的全面检测,是一台“图谱合一”的综合性遥感设备。

2.应用流程
活体的罂粟植株由于其特定的生理特征和结构,会对光线产生特定的反射率曲线,尤其在花果期阶段,这种反射率光谱曲线与其他植被存在特定的差异。利用这一特性,可以通过以下技术路线实现罂粟植株的自动识别。
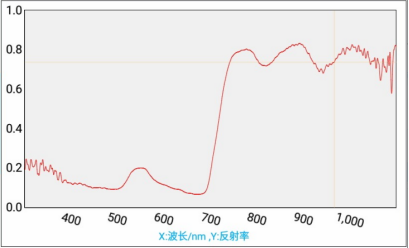
图5 罂粟植株反射率光谱曲线示意图
(1)利用无人机高光谱采集样本区域图像,样本区域中应该包含罂粟苗期或花果期的生长植株;
(2)在图像处理软件中(如ENVI)人工标记样本图像的罂粟植株区域,并区分苗期植株和花果期植株,制作成罂粟植株标准图像(ROI),并存储为罂粟植株数据库,后期监测中均可以使用;

图6 罂粟植株特征光谱和实地检测结果
(3)利用ENVI或者公司开发的数据解译软件,将外业采集的图像导入软件中,应用机器学习方法和标准罂粟植株数据库对采集的原始进行自动检测,并自动标记出花果期或苗期的罂粟植株区域,最后结合人工目视图像检查,和实地检查进行铲除。
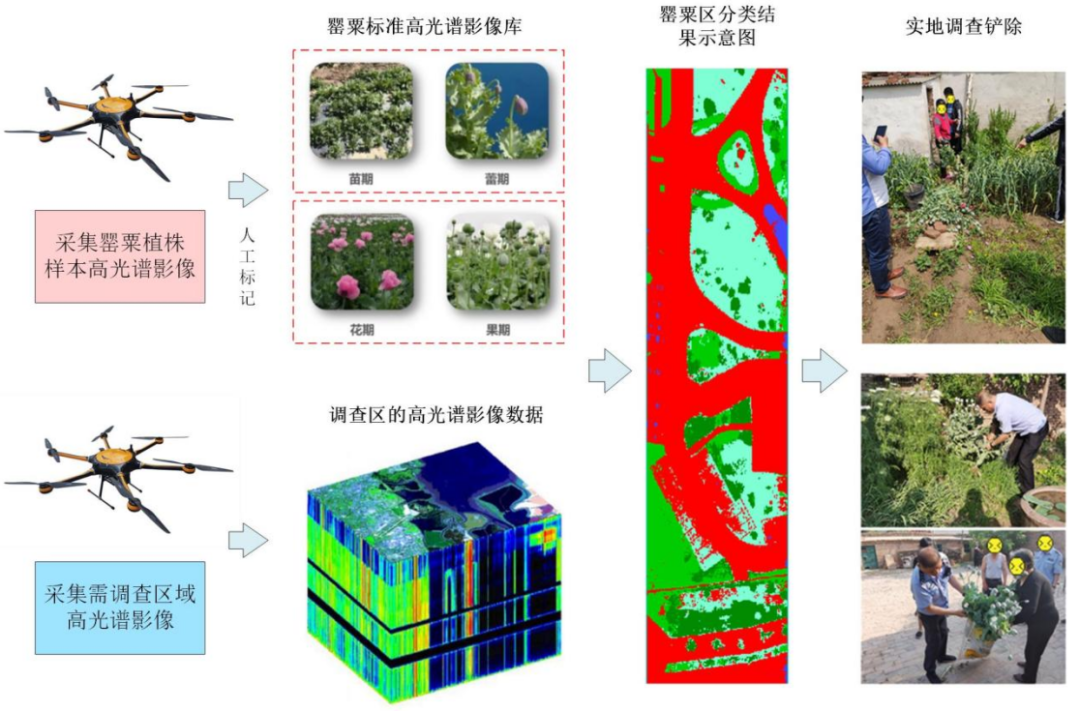
图7 罂粟植株无人机高光谱监测技术流程
| 无人机-DJI M300RTK | 无人机高光谱成像系统 | ||
| 型号 | SF500 | ||
| 参数 | 配置 | 参数 | 配置 |
| 尺寸 | 尺寸(展开,不包含桨叶):810×670×430 mm(长×宽×高) | 分光方式 | 透射光栅 |
| 尺寸(折叠,包含桨叶):430×420×430 mm(长×宽×高) | 光谱范围 | 400-1000nm | |
| 对称电机轴距 | 895 mm | 光谱波段数 | 1200(1x),600(2x),300(4x) |
| 重量(含下置单云台支架) | 空机重量(不含电池):3.6 kg | 光谱分辨率 | 优于2.5nm |
| 空机重量(含双电池):6.3 kg | 狭缝宽度 | 25µm | |
| 单云台减震球**负重 | 930g | 透射效率 | >60% |
| **起飞重量 | 9 kg | F数 | F/2.6 |
| 工作频率 | 2.4000-2.4835 GHz;5.725-5.850 GHz | 探测器 | CMOS |
| 发射功率(EIRP) | 2.4000-2.4835 GHz: | 空间像素数 | 1920(1x),960(2x),480(4x) |
| 29.5 dBm(FCC);18.5dBm(CE)18.5 dBm(SRRC);18.5dBm(MIC) | 像素尺寸 | 5.86 µm | |
| 5.725-5.850 GHz:28.5 dBm(FCC);12.5dBm(CE)28.5 dBm(SRRC) | 有效像素位深 | 12bits | |
| 悬停精度(P-GPS) | 垂直:±0.1 m(视觉定位正常工作时)±0.5 m(GPS 正常工作时)±0.1 m(RTK 定位正常工作时) | 采集速度 | 全谱段≥50fps |
| 水平:±0.3 m(视觉定位正常工作时)±1.5 m(GPS 正常工作时)±0.1 m(RTK 定位正常工作时) | 视场角(FOV) | 15.6°@f=35mm | |
| RTK 位置精度 | 在 RTK FIX 时:1 cm+1 ppm(水平)1.5 cm + 1 ppm(垂直) | 瞬时视场角(IFOV) | 0.71mrad@f=35mm |
| **旋转角速度 | 俯仰轴:300°/s 航向轴:100°/s | 可选镜头焦距 | 16mm/25mm/35mm |
| **俯仰角度 | 30° (P模式且前视视觉系统启用:25°) | 云台 | 定制高稳云台,双轴双电机 |
| **上升速度 | S 模式:6 m/s,P 模式:5 m/s | 定位系统 | 优于10cm |
| **下降速度(垂直) | S 模式:5 m/s P 模式:4 m/s | 内置采集处理单元 | i7处理器,8GB,512GB硬盘 |
| **倾斜下降速度 | S 模式:7 m/s | ||
| **水平飞行速度 | S 模式:23 m/s, P 模式:17 m/s | ||
| **飞行海拔高度 | 5000 m(2110 桨叶,起飞重量≤7 kg)/ 7000 m(2195 高原静音桨叶,起飞重量≤7 kg) | ||
| **可承受风速 | 15m/s(起飞及降落阶段为12m/s) | ||
| **飞行时间 | 55 min | ||
| 支持云台安装方式 | 下置单云台、上置单云台、下置双云台、下置单云台+上置单云台、下置双云台+上置单云台 | ||
| IP 防护等级 | IP45 | ||
| GNSS | GPS+GLONASS+BeiDou+Galileo | ||
| 工作环境温度 | -20°C 至 50°C | ||
 微信二维码
微信二维码
 在线客服
在线客服


 关注官方微信
关注官方微信




